Descubra cómo los SuperLimbs del MIT ayudan a los astronautas a mantenerse en lo alto de la Luna

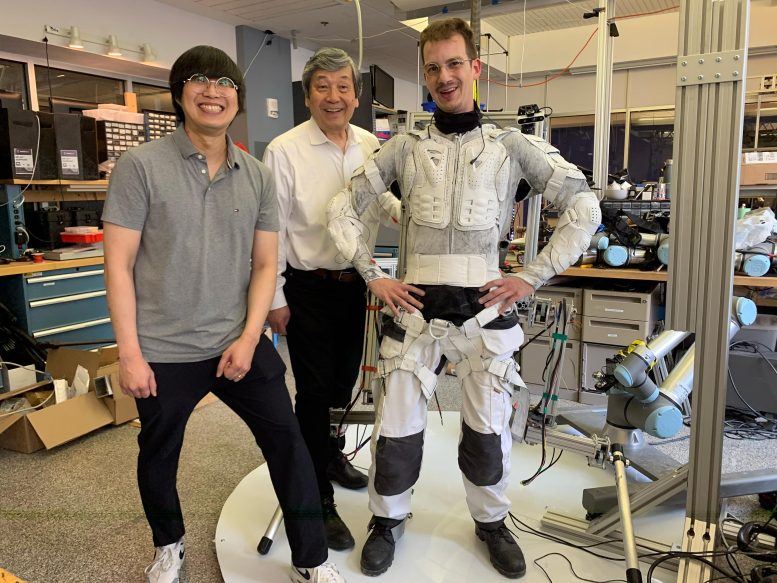
SuperLimbs, un sistema de extremidades robóticas portátil construido por ingenieros del MIT, está diseñado para ayudar físicamente a un astronauta a ponerse de pie después de una caída, ayudándole a conservar energía para otras tareas esenciales. En la foto, desde la izquierda, están Sang-Yoep Lee, Harry Asada y Erik Ballesteros. Créditos: Jennifer Chu
MITEl proyecto SuperLimbs tiene como objetivo mejorar la movilidad de los astronautas en la Luna con extremidades robóticas que les ayuden a levantarse después de caídas, mejorando la seguridad y la eficiencia para futuras misiones lunares.
¿Buscas una risa rápida? Intente ver videos de astronautas caminando sobre la luna. Las salidas en cámara lenta de las misiones Apolo, que muestran a los astronautas tropezando y tropezando, están relacionadas de manera divertida.
Estos incidentes lunares también representan una oportunidad para la innovación, como señalan los ingenieros del MIT.
«Los astronautas son físicamente muy capaces, pero pueden luchar en la Luna, donde la gravedad es una sexta parte de la de la Tierra pero su inercia sigue siendo la misma. Además, llevar un traje espacial supone una carga importante y puede restringir sus movimientos”, afirma Harry Asada. Es profesor de ingeniería mecánica en el MIT. «Queremos proporcionar una forma segura para que los astronautas se recuperen si se caen».
Asada y sus colegas están diseñando un par de piernas robóticas portátiles que pueden sostener físicamente a un astronauta y levantarlo después de una caída. El sistema, que los investigadores llamaron Supernumerary Robotic Limbs o «SuperLimbs», está diseñado para extenderse desde una mochila, que también lleva el sistema de soporte vital del astronauta, junto con el controlador y los motores para operar las piernas.
Vídeo resumen de la investigación.
Los científicos del MIT construyeron un prototipo físico, así como un sistema de control para dirigir las piernas, basándose en la retroalimentación del astronauta que lo utiliza. El equipo probó una versión preliminar en sujetos sanos que también se ofrecieron como voluntarios para usar una prenda ajustada similar al traje espacial de un astronauta. Cuando los voluntarios intentaron levantarse de una posición sentada o acostada, lo hicieron con menos esfuerzo cuando fueron asistidos por SuperLimbs, en comparación con cuando tuvieron que recuperarse solos.
El equipo de investigación prevé que SuperLimbs pueda ayudar físicamente a los astronautas después de una caída y, en el proceso, ayudarlos a conservar su energía para otras tareas esenciales. El diseño podría resultar especialmente útil en los próximos años, con el lanzamiento de NASAla misión Artemis, que prevé enviar astronautas de regreso a la luna por primera vez en más de 50 años. A diferencia de la misión principalmente exploratoria de Apolo, los astronautas de Artemis se esforzarán por construir la primera base lunar permanente, una tarea físicamente exigente que requiere múltiples actividades extravehiculares prolongadas (EVA).
«Durante la era Apolo, cuando los astronautas caían, el 80 por ciento de las veces era mientras realizaban perforaciones o algún tipo de trabajo con herramientas», dice Erik Ballesteros, miembro del equipo y estudiante de doctorado del MIT. “Las misiones Artemis realmente se centrarán en la construcción y la perforación, por lo que el riesgo de que caigan es mucho mayor. Creemos que SuperLimbs puede ayudarlos a recuperarse para que puedan ser más productivos y extender sus EVA».
Asada, Ballesteros y sus colegas presentarán su diseño y estudio esta semana en la Conferencia Internacional IEEE sobre Robótica y Automatización (ICRA). Sus coautores incluyen al postdoctorado del MIT Sang-Yoep Lee y Kalind Carpenter del Jet Propulsion Laboratory.
Tomar una posición
El diseño del equipo es la última aplicación de SuperLimbs, que Asada desarrolló por primera vez hace unos diez años. Desde entonces, lo ha adaptado a una variedad de aplicaciones, incluida la ayuda a los trabajadores en la fabricación, la construcción y la construcción de aeronaves.
Más recientemente, Asada y Ballesteros han cuestionado si SuperLimbs podría ayudar a los astronautas, particularmente porque la NASA planea enviar astronautas de regreso a la superficie de la luna.
«En comunicación con la NASA aprendimos que el problema de la llegada a la Luna representa un riesgo grave», dice Asada. «Nos dimos cuenta de que podíamos hacer algunas modificaciones a nuestro diseño para ayudar a los astronautas a recuperarse de las caídas y continuar con su trabajo».
Primero, el equipo dio un paso atrás para estudiar las formas en que los humanos se recuperan naturalmente de una caída. En su nuevo estudio, pidieron a varios voluntarios sanos que intentaran ponerse de pie después de acostarse de costado, de frente y de espaldas.
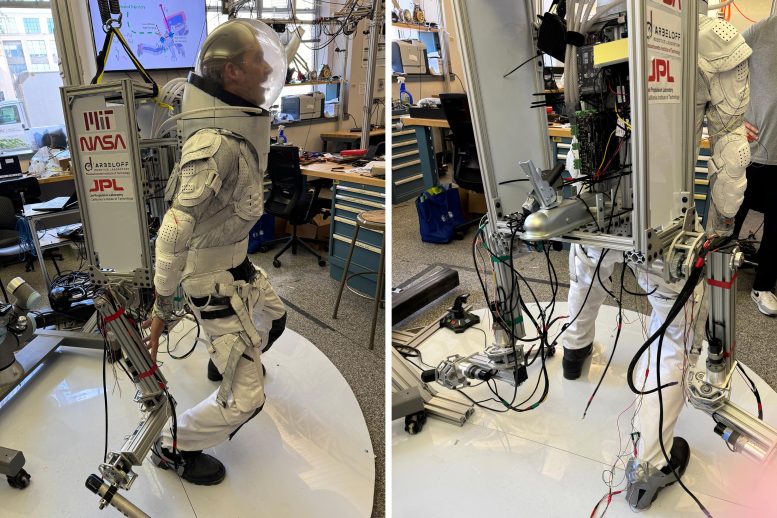
El equipo del MIT imagina que SuperLimbs podría ayudar físicamente a los astronautas después de una caída y, en el proceso, ayudarlos a conservar su energía para otras tareas esenciales. «Se siente como una fuerza extra que se mueve contigo», dice Erik Ballesteros, en la foto, quien también probó el traje y el brazo asistido. «Imagina que llevas una mochila y alguien agarra la parte superior y parece tirar de ti. Con el tiempo, se convierte en algo natural.» Crédito: Cortesía de los investigadores.
Luego, los investigadores observaron cómo los intentos de los voluntarios de ponerse de pie cambiaban cuando sus movimientos eran restringidos, de manera similar a cómo los movimientos de los astronautas están limitados por la mayoría de los trajes espaciales. El equipo construyó un traje para imitar la rigidez de un traje espacial tradicional e hizo que voluntarios lo usaran antes de intentar levantarse nuevamente desde varias posiciones caídas. La secuencia de los movimientos de los voluntarios fue similar, aunque requirió mucho más esfuerzo en comparación con sus intentos tranquilos.
El equipo mapeó los movimientos de cada voluntario mientras se ponía de pie y descubrió que cada uno de ellos realizaba una secuencia común de movimientos, pasando de una postura o «punto de referencia» a la siguiente, en un orden predecible.
«Esos experimentos ergonómicos nos ayudaron a modelar, de forma sencilla, cómo se pone una persona», afirma Ballesteros. «Podemos estimar que alrededor del 80 por ciento de los humanos se despiertan de manera similar. Luego diseñamos un controlador alrededor de esa trayectoria».
Una mano amiga
El equipo desarrolló un software para generar una trayectoria para un robot, siguiendo una secuencia que ayuda a sostener a un humano y ponerlo de pie. Aplicaron el controlador a un brazo robótico pesado y fijo, que está sujeto a una mochila grande. Luego, los investigadores sujetaron la mochila al voluminoso traje y ayudaron a los voluntarios a volver a ponerse el traje. Pidieron a los voluntarios que se recostaran nuevamente boca arriba, de frente o de costado, y luego les pidieron que intentaran levantarse mientras el robot detectaba los movimientos de la persona y se adaptaba para ayudarlos a levantarse.
En general, los voluntarios pudieron mantenerse de pie de manera estable con mucho menos esfuerzo cuando fueron asistidos por el robot, en comparación con cuando intentaron mantenerse de pie solos mientras usaban el voluminoso traje.
«Se siente como si una fuerza extra se moviera contigo», dice Ballesteros, quien también probó el traje y el brazo asistido. «Imagínate llevar una mochila y alguien te agarra por la parte superior y te levanta. Con el tiempo, se convierte en algo natural.»
Los experimentos confirmaron que el sistema de control puede dirigir con éxito un robot para ayudar a una persona a levantarse después de una caída. Los investigadores planean combinar el sistema de control con su última versión de SuperLimbs, que incluye dos brazos robóticos multiarticulados que pueden extenderse desde una mochila. La mochila también contendrá la batería y los motores del robot, junto con un sistema de ventilación para astronautas.
«Diseñamos estos brazos robóticos basándonos en la búsqueda por IA y la optimización del diseño, para buscar diseños de manipuladores robóticos clásicos con ciertas limitaciones de ingeniería», afirma Ballesteros. «Filtramos muchos diseños y buscamos el diseño que consume la menor cantidad de energía para levantar a una persona. Esta versión de SuperLimbs es el producto de ese proceso».
Durante el verano, Ballesteros construirá el sistema SuperLimbs completo en el Jet Propulsion Laboratory de la NASA, donde planea simplificar el diseño y minimizar el peso de sus piezas y motores mediante el uso de materiales ligeros y avanzados. Luego, espera unir las extremidades a los trajes de los astronautas y probarlas en simuladores de baja gravedad, con el objetivo de algún día ayudar a los astronautas en futuras misiones a la luna y Marte.
«Usar un traje espacial puede ser una carga física», señala Asada. «Los sistemas robóticos pueden ayudar a aliviar esa carga, ayudando a los astronautas a ser más productivos durante sus misiones».
Esta investigación fue apoyada, en parte, por la NASA.
Related Posts
4 de cada 5 mujeres embarazadas en Irlanda tienen deficiencia de hierro en el tercer trimestre, según un estudio

Un gran avance para la aviación sostenible
